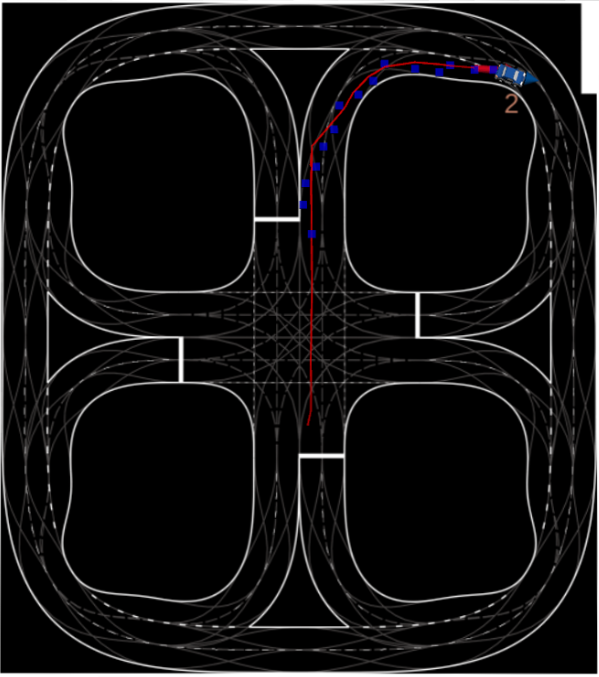
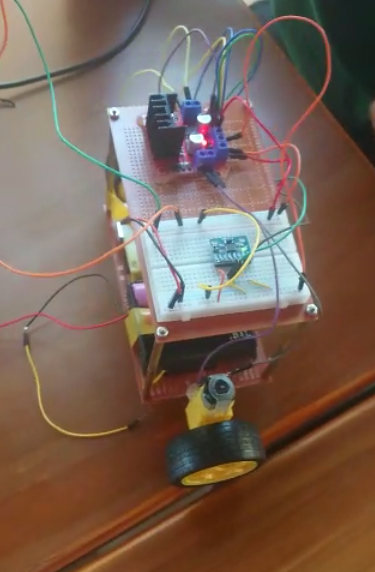
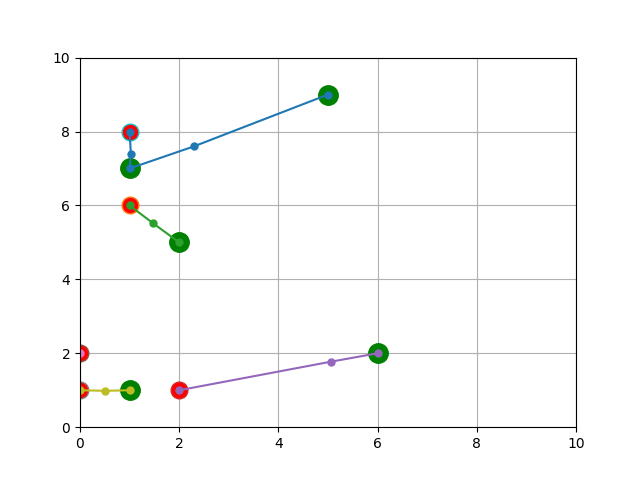
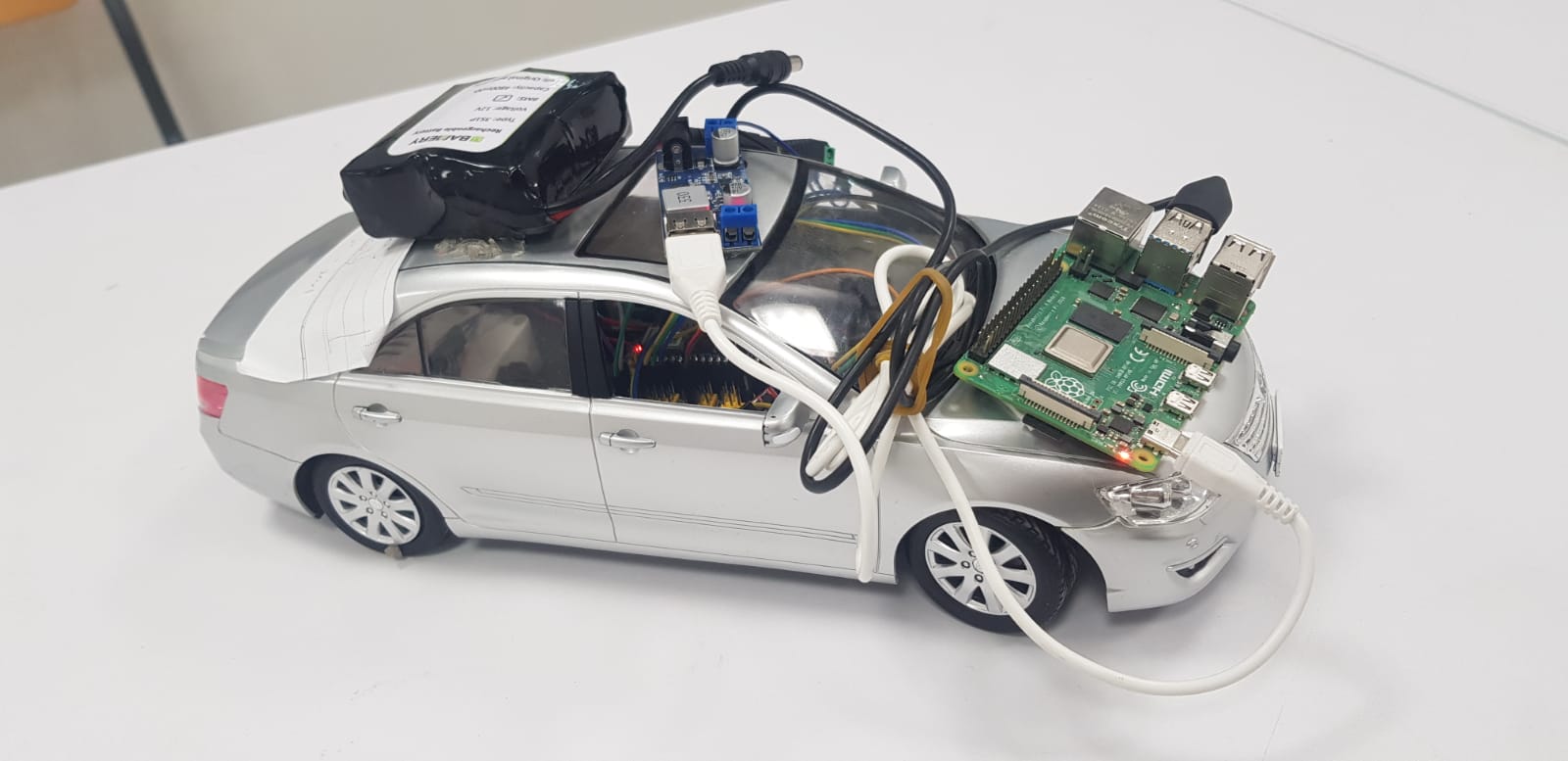
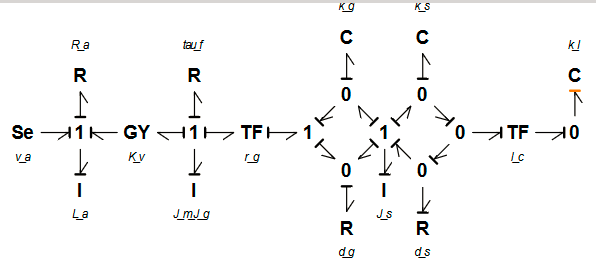
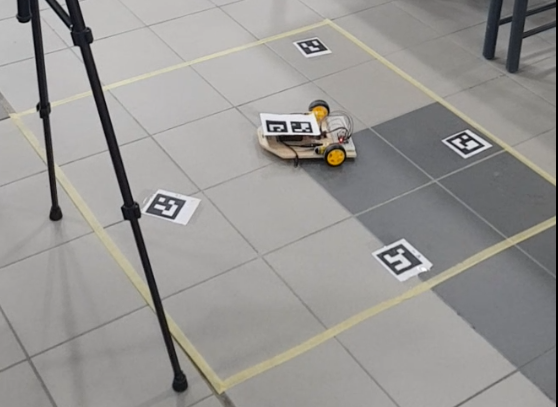
Bachelor Thesis Bachelor Thesis Lane-level Map Matching Algorithm for Model-scale Vehicles Course Projects Self Balancing Robot Mechatronics Course Project Multi UAV Task Assignment and Path Planning Metaheuristic Optimization Techniques for Multi-Cooperative Systems 4 DOF Humanoid Robot Arm Robotics Course Partial-Autonomous ROS-enabled Ackermann Vehicle Autonomous Systems Course Bond Graph Project Bond Graph Course Hand Gesture Controlled RC Drone Sensors Course Differential Drive Mobile Robot Positioning System and Target Tracking Image Processing Course Internships Networked control systems Internship Control and Dynamic Systems Lab Internship